|
|
| システム概要 |
|
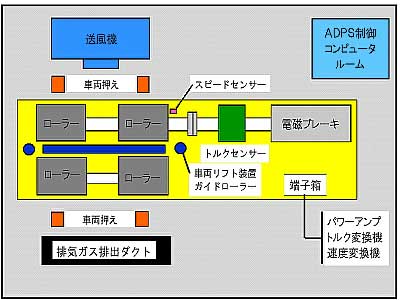
<四輪用ADPSの構成図> (二輪用ADPSの構成図はこちら)
小野測器製シャーシダイナモを使用し、機器の安定度を保ち、その上にADPS制御コンピューターを組み入れた構成。
システムの概要ですが、ローラーを駆動輪(タイヤ)が回すスピードの変化をスピードセンサーが検出し、ローラの速度上昇(加速度)を一定に保つようコンピュータを使い、電磁ブレーキを1秒間に100回制御を行います。
速度制御は任意に設定が可能で、例えば「毎秒1km/h」と速度上昇(加速度)を設定しますと、測定範囲40km/h〜180km/hまでの間、タイヤが回そうとする力に対して、電磁リターダーがブレーキを掛け、毎秒加速度1km/h以上にないようにブレーキを掛け反発していきます。
設定加速度以上に回ろうとする場合はブレーキを掛け、この抑えた反力をトルク検出器で読み取って行きます。このブレーキ制御をリターダー電磁ブレーキが秒100回行い、範囲間を連続的に測定し、測定車両の駆動力を求め、駆動輪出力を換算(トルク×rpm÷716.2)してパワーグラフ表示します。
制御コンピュータのOSにはWINDOWS98を使用し、測定器との連結も容易となり、当社揃えとしては下記に構成図がありますが、その他にもお持ち頂ければ合わせて測定結果を表示できます。
|
|
|
|